Informații despre sistemul de transport cu navetă 4D





transportor cu lanț
| proiect | Date de bază | Remarcă |
| model | SX-LTJ-1.0T -600H | |
| Motorreductor | COASE | |
| tipul de structură | Cadrul este fabricat din aliaj de aluminiu, iar picioarele și curbele sunt fabricate din oțel carbon | |
| metodă de control | Control manual/automat/online/automat | |
| măsuri de securitate | Interblocare electrică, ghidaje de protecție pe ambele părți | |
| adoptați standardul | JB/T7013-93 | |
| încărcătură utilă | Maxim 1000 kg | |
| inspecția mărfii | Senzori fotoelectrici | SICK/P+F |
| șină de lanț | Șină din nailon cu frecare redusă | |
| lanț transportor | Lanțul Donghua | |
| rulment | Fukuyama Hardware, Rulmenți cu bile etanșați | |
| viteză de transfer | 12 m/min | |
| Tratarea și acoperirea suprafețelor | Decapare, fosfatare, pulverizare | |
| controlul zgomotului | ≤73db | |
| acoperire de suprafață | gri de calculator | Mostre atașate |
Structura echipamentului
Transportorul este compus din cadru, stabilizatori, unitate de acționare etc. Cadrul este fabricat din aliaj de aluminiu, iar ambele capete sunt roți fixe fără dinți, cu funcție de inversare. Lanțul transportorului este un lanț drept, cu două rânduri, cu pas P=15,875 mm. Suportul lanțului este fabricat din polietilenă cu greutate moleculară înaltă (UHMW) cu efect autolubrifiant. Stabilizatorii sudați sunt conectați la cadrul principal prin placa de presiune cu șuruburi, picioarele de reglare cu șurub M20 sunt conectate la sol, iar înălțimea suprafeței de transport poate fi reglată cu +25 mm. Dispozitivul de acționare este compus dintr-un motor de decelerare încorporat la mijloc, un ansamblu arbore de transmisie, un set de pinioane de transmisie, un scaun al motorului și un dispozitiv de tensionare a lanțului, iar scripetele de tensionare cu șurub de reglare tensionează lanțul de transport.
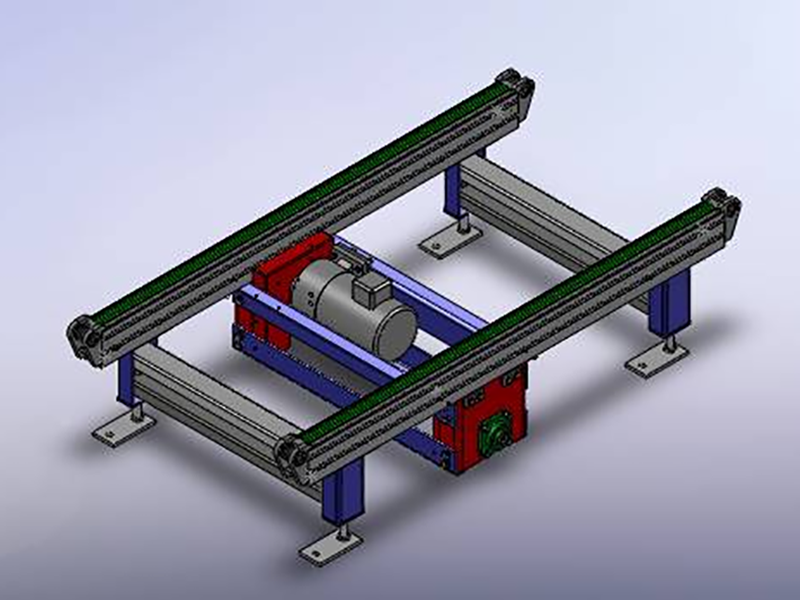
principiul de funcționare:
Motorul acționează arborele de antrenare prin grupul de transmisie, iar arborele de antrenare acționează lanțul de transport pentru a realiza funcția de transport a paletei.
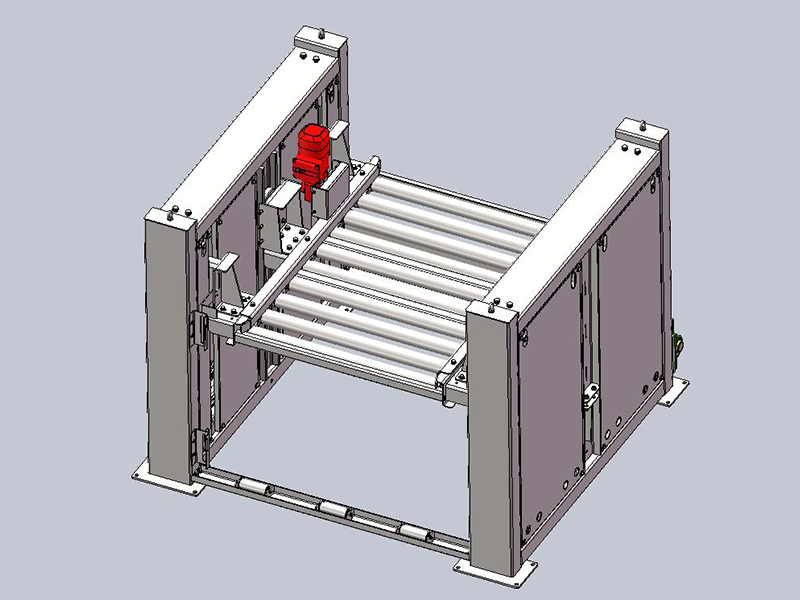
Transportor cu role
| Articol | Date de bază | Observații |
| Model | SX-GTJ-1.0T -600H | structură de oțel |
| Motorreductor | COASE | |
| tipul de structură | îndoirea oțelului carbon | |
| metodă de control | Control manual/automat/online/automat | |
| încărcătură utilă | Maxim 1000 kg | |
| viteză de transfer | 12 m/min | |
| rolă | 76 role cu lanț dublu | |
| lanț de transmisie | Fabrica de lanțuri Huadong | |
| rulment | Axa Ha | |
| Tratarea și acoperirea suprafețelor | Decapare, fosfatare, pulverizare | |
Structura echipamentului
Structura echipamentului: Mașina cu masă cu role este compusă dintr-un cadru, stabilizatori, role, acționări și alte unități. Rolă galvanizată φ76x3 cu pinion dublu pe o singură parte, distanța dintre role P=174,5 mm, pinion dublu pe o singură parte. Stabilizatorii sudați sunt conectați la cadrul principal prin placa de presiune cu șuruburi, picioarele de reglare cu șuruburi M20 sunt conectate la sol, iar înălțimea suprafeței de transport poate fi reglată cu +25 mm. Dispozitivul de acționare este compus dintr-un motor de decelerare încorporat la mijloc, un set de pinioane de transmisie, un scaun al motorului și un dispozitiv de tensionare a lanțului.
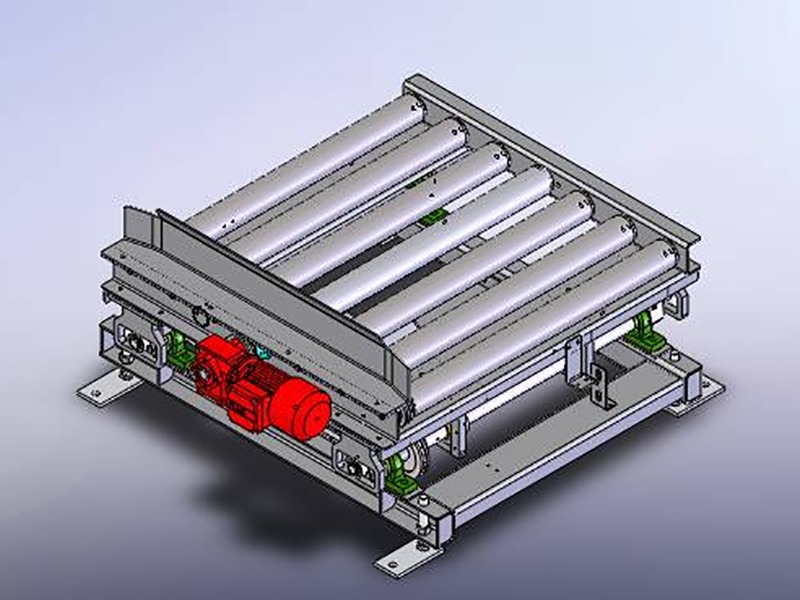
Principiu de funcționare: Motorul acționează rola prin lanț, iar rola este transmisă către rola adiacentă printr-un alt lanț și apoi către o altă rolă pentru a realiza funcția de transport a transportorului.
Mașină de ridicare și transfer cu cric
| proiect | Date de bază | Remarcă |
| model | SX-YZJ-1.0T-6 0 0H | structură de oțel |
| Motorreductor | COASE | |
| tipul de structură | îndoirea oțelului carbon | |
| metodă de control | Control manual/automat/online/automat | |
| măsuri de securitate | Interblocare electrică, ghidaje de protecție pe ambele părți | |
| Standard | JB/T7013-93 | |
| încărcătură utilă | Maxim 1000 kg | |
| inspecția mărfii | Senzori fotoelectrici | SICK/P+F |
| rolă | 76 role cu lanț dublu | |
| Rulmenți și carcase | Rulment: Arbore Harbin; Scaun rulment: Fushan FSB | |
| viteză de transfer | 12 m/min | |
| Tratarea și acoperirea suprafețelor | Decapare, fosfatare, pulverizare | |
| controlul zgomotului | ≤73dB | |
| acoperire de suprafață | gri de calculator | Mostre atașate |
Structura echipamentului
Structura echipamentului: Mașina de transfer cu role este compusă din piese de transport, mecanisme de ridicare, componente de ghidare și alte unități. Reglarea înălțimii suprafeței de transport este de +25 mm. Mecanismul de ridicare adoptă principiul brațului manivelă acționat de motor, iar dispozitivul de acționare este compus dintr-un motor de reducere încorporat în mijloc, un set de roți dințate de transmisie, un scaun al motorului și un dispozitiv de tensionare a lanțului.
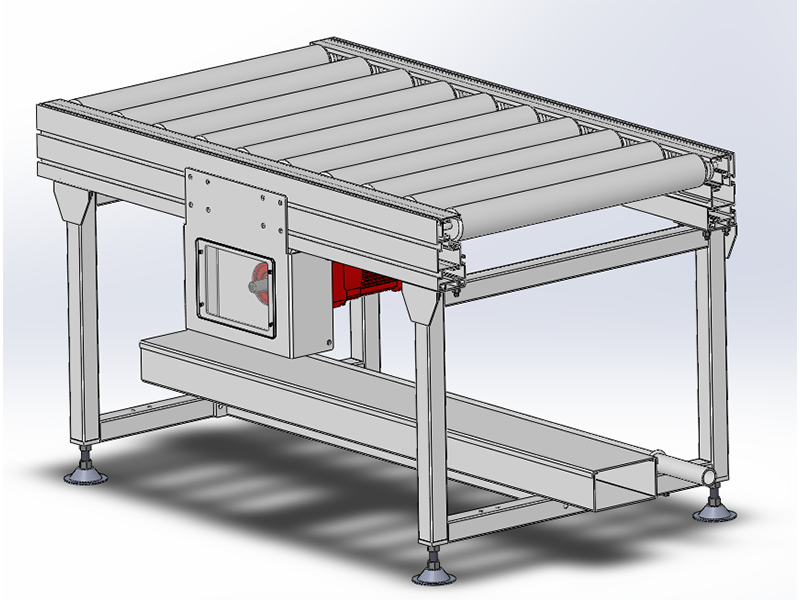
Principiu de funcționare: Când paleta este transportată la echipament de către transportorul corespunzător, motorul cu cric funcționează, acționând mecanismul cu came pentru a ridica paleta, iar motorul cu cric se oprește când aceasta este la locul ei; motorul de transport pornește, transportând paleta la echipamentul de andocare, iar motorul se oprește, motorul cu cric funcționează, iar mecanismul cu came este acționat pentru a coborî echipamentul, iar când aceasta este la locul ei, motorul cu cric se oprește pentru a finaliza un ciclu de lucru.
Transportor de tranziție
| 1) proiect | Date de bază | Remarcă |
| model | SX-GDLTJ-1.0T-500H-1.6L | |
| Motorreductor | COASE | |
| tipul de structură | Picioare și oțel carbon îndoit | |
| metodă de control | Control manual/automat/online/automat | |
| măsuri de securitate | Interblocare electrică, ghidaje de protecție pe ambele părți | |
| Standard | JB/T7013-93 | |
| încărcătură utilă | Maxim 1000 kg | |
| inspecția mărfii | Senzori fotoelectrici | SICK/P+F |
| șină de lanț | Șină din nailon cu frecare redusă | |
| lanț transportor | Lanțul Donghua | |
| Rulmenți și carcase | Rulment: Arbore Harbin, scaun rulment: Fukuyama FSB | |
| viteză de transfer | 12 m/min | |
| Tratarea și acoperirea suprafețelor | Decapare, fosfatare, pulverizare | |
| controlul zgomotului | ≤73dB | |
| acoperire de suprafață | gri de calculator | Mostre atașate |
Structura echipamentului
Structura echipamentului: Acest echipament este utilizat la îmbinarea dintre palan și raft, iar transportorul este compus dintr-un cadru, stabilizatori și o unitate de acționare. Lanțul transportorului este un lanț drept cu două rânduri, cu pasul P=15,875 mm. Suportul lanțului este fabricat din polietilenă cu greutate moleculară înaltă (UHMW) cu efect autolubrifiant. Picioare sudate, conectate la corpul raftului. Dispozitivul de acționare este compus dintr-un motor de decelerare încorporat la mijloc, un ansamblu arbore de acționare, un set de roți dințate de transmisie, un scaun motor și un dispozitiv de tensionare a lanțului, iar scripetele de tensionare cu șurub de reglare tensionează lanțul transportor.
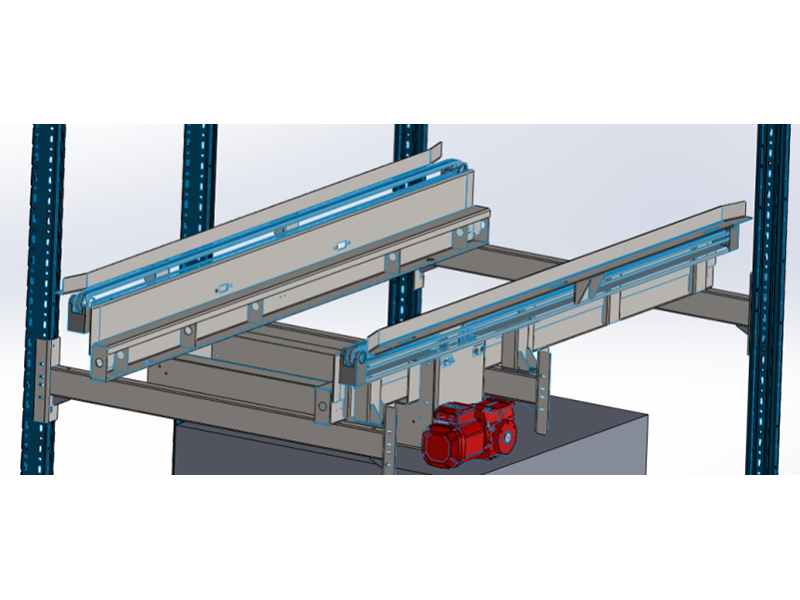
Principiu de funcționare: Motorul acționează arborele de antrenare prin grupul de transmisie, iar arborele de antrenare acționează lanțul de transport pentru a realiza funcția de transport a paletei.
lift de podea
| proiect | Date de bază | Remarcă |
| model | LDTSJ-1.0T-700H | structură de oțel |
| Motorreductor | COASE | |
| tipul de structură | Coloană: îndoire din oțel carbon Partea exterioară: etanșare din placă de oțel | |
| metodă de control | Control manual/automat/online/automat | |
| măsuri de securitate | Interblocare electrică, dispozitiv de oprire a căderii | |
| Standard | JB/T7013-93 | |
| încărcătură utilă | Maxim 1000 kg | |
| inspecția mărfii | Senzori fotoelectrici | SICK/P+F |
| rolă | 76 role cu lanț dublu | |
| lanț de ridicare | Lanțul Donghua | |
| rulment | Rulmenți generali: Rulmenți cu cheie arbore Harbin: NSK | |
| viteză de alergare | Viteză de transport: 16 m/min, viteză de ridicare: 6 m/min | |
| Tratarea și acoperirea suprafețelor | Decapare, fosfatare, pulverizare | |
| controlul zgomotului | ≤73dB | |
| acoperire de suprafață | gri de calculator | Mostre atașate |
structura și caracteristicile principale
Cadru: o placă îndoită din oțel carbon de 5 mm este utilizată ca coloană, iar exteriorul este etanșat cu placă de oțel;
Partea de ridicare:
Un cadru de ridicare este instalat în partea superioară a palanului, cadrul este fabricat din oțel carbon, iar motorul de ridicare acționează ansamblul pinionului de ridicare pentru a lucra prin lanț.
Platforma de încărcare:
Fabricată din oțel carbon. Platforma de încărcare este echipată cu un transportor standard.
principiul de funcționare:
Motorul de ridicare acționează platforma de încărcare pentru a finaliza lucrarea de ridicare; transportorul de pe platforma de încărcare poate face ca mărfurile să intre și să iasă fără probleme din ascensor.



